Our Products
Aasyn Core
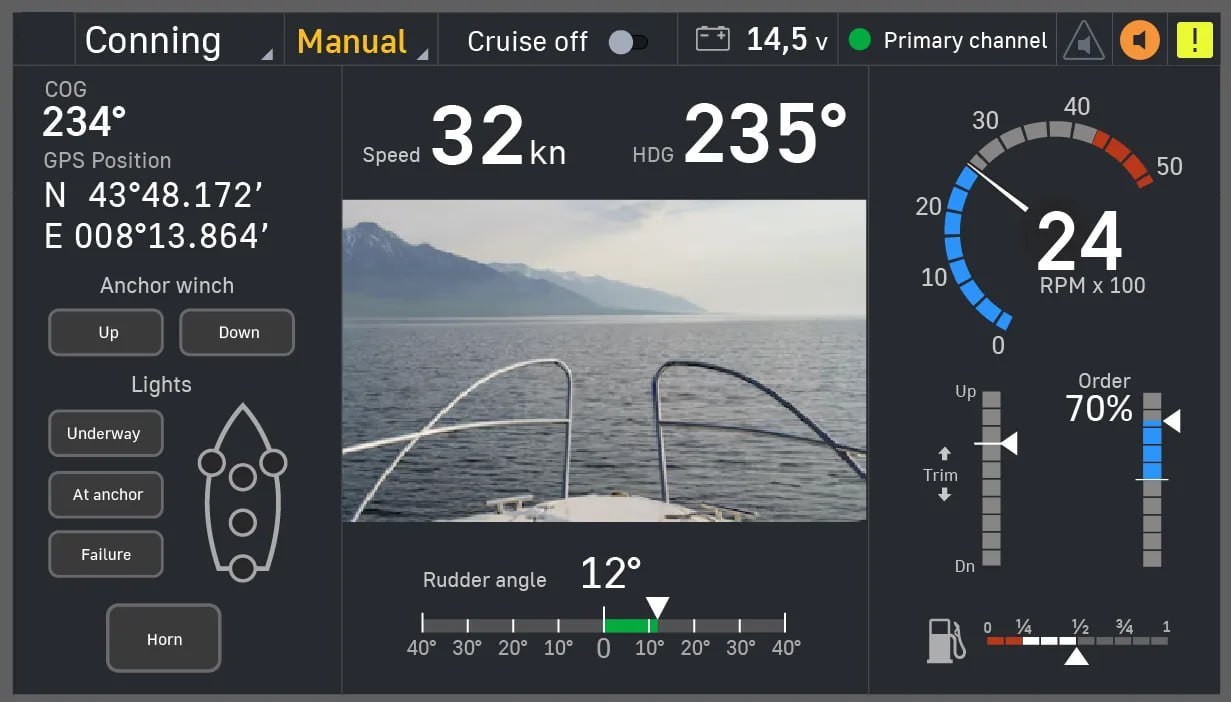
Navigation and control software for unmanned surface vessels. Runs on the vessel's onboard computer and connects to a shore-based operator workstation. Handles route execution, obstacle avoidance, and propulsion control in both automatic and manual modes.
- Automatic and manual modes with adaptive gain autopilot and CPA/TCPA collision avoidance
- Universal platform — configurable for any USV hull, propulsion type and sensor suite
- Encrypted onboard–shore data link with failsafe autonomous behaviour on comms loss
- Multi-sensor fusion: radar, AIS, GNSS, lidar, camera
HIL Test Bench
A test bench where real vessel hardware — onboard computer, steering controller, engine management unit — connects to a simulated maritime environment. Sensor inputs (radar, GPS, AIS, camera) are generated in software. Allows systematic testing of navigation algorithms and fault responses without sea trials.
- Real hardware connected to simulated radar, AIS, GNSS, camera and comms signals
- Scenario engine: adverse weather, GPS spoofing, sensor failures, cyberattack simulation
- Reduces development cost 20–30% versus traditional sea trial approach
- Audit-ready test logs accepted by DNV, Lloyd's Register and other class bodies


Digital Data Delivery
Software platform for centralised delivery of all vessel digital data required for regulatory compliance — AVCS electronic navigational charts, digital publications, nautical documents, and operational records. Manages licences, tracks permit expiry, and pushes delta updates to onboard systems. Ensures vessels meet IMO, SOLAS, and flag state requirements for digital record-keeping and chart carriage.
- Centralised delivery of AVCS charts, digital publications, and compliance documents to onboard systems
- Delta update management — only changed cells transmitted, minimising bandwidth
- Licence tracking, permit administration, and expiry filtering across fleet
- IMO, SOLAS, and flag state compliant · IHO S-57 / S-63 data formats
- S-100 ready — architecture designed for next-generation IHO S-100 data framework migration